革新的技術実証1号機搭載実験
深層学習を応用した革新的姿勢センサの開発
Deep Learning Attitude Sensor
DLAS Project
Top > 恒星姿勢センサ(STT)
民生品を用いた安価で高性能な恒星姿勢センサ(STT)の開発
我々の目指す紫外線観測衛星を実現する上で避けて通れない技術的課題が、衛星の姿勢安定度です。例えば、地上で天体写真を撮る場合、強固な三脚にカメラを固定するのですが、地面のない衛星の場合にはそれができません。ずれた場合はリアクションホイールで補正すればよいのですが、補正量を知るには絶対的な基準点が必要になります。そこで人工衛星は動かない基準点として星を使います。発想の原点はかつて航海に使われた六分儀と同じですが、STTはそのハイテク版ともいえます。
衛星ミッションにおけるSTTの重要性
STTは現時点で人工衛星の姿勢センサの中で最も高い精度を持ちます。2005年に打ち上げられた日本のX線天文衛星 "すざく" にも当然STTが搭載されていましたが、これは姿勢変更のたびに、見えるべき恒星の配列情報を地上で計算しアップロードする必要がありました。このため、すざく は突発天体の追観測など緊急運用を不得意とし、衛星運用当番がどんなに頑張っても突発天体の観測開始までには半日以上のかかる鈍足の衛星でした。これに対して2004年に打ち上けられたNASAのガンマ線バースト観測衛星 Swift は、地上からの追加情報無しに自律的に姿勢を変更して突発天体を観測することができます。これを可能にしたのが「第三世代」のSTTであり、これらは全天の星カタログをSTT内部に保持し、撮像・星抽出・恒星識別・姿勢計算までを完結する高度なシステムになっています。当然、この様な装置には高性能演算装置と大容量のメモリ、そして高感度カメラが必要であり、JAXAの正規ミッションで採用される高性能な宇宙実績品は1台1億円程度が相場になっています。
STTがこれほど高額なのは、これがミッションの成否を決定づける最重要コンポーネントだからです。これが動かなければ観測装置を見たい方向をフレーミングすることができず、高度な観測ミッションは直ちに遂行不可能になります。また、地上で星を撮影するのとは異なり、衛星軌道上では宇宙線などの強烈な放射線と、太陽や地球からの光に曝されながら、日中は灼熱、夜間は極寒の過酷な撮影になりますです。しかも、姿勢制御は人工衛星にとって電源確保や温度維持のための死活問題であり、万が一誤動作があった場合には、ミッションのみならず衛星本体の機能喪失に直結します。特に失敗に厳しい日本国内ではこれらの特徴が参入障壁となるため、一流の大手宇宙メーカーでさえ参入には二の足を踏む状態になっています。
STTの原理・構造
以下では、光の入り口から順にSTTの原理・機能を簡単に紹介します。
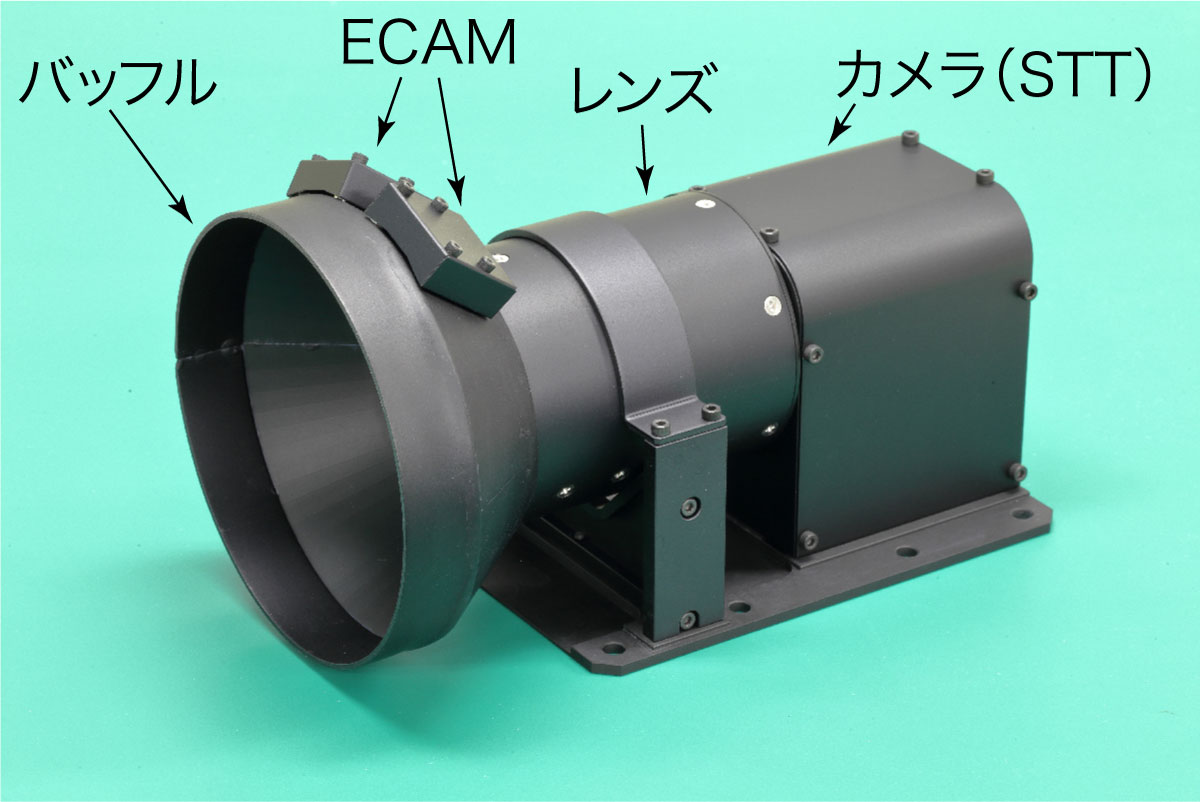
(a)バッフル: レンズ先端につけるフード状の筒です。通常の写真撮影でも逆光の際にはレンズフードをつけることがありますが、衛星の場合、背後からの強烈な太陽光、正面にはそれを反射する明るい地球、場合によっては月も見える中で星を撮影する必要があります。バッフルはそれらの光を遮るために必須かつ、実はSTTの稼働可能時間・方向を決定付ける重要構造です。DLASでは、オーソドックスな2段バッフル構造を採用しています(図2-1)。
(b)レンズ: その名の通りレンズです。衛星に乗せる際の最初の関門がロケット打ち上げ時の振動・衛星分離時の1000G近い衝撃であり、それに耐えるレンズ保持構造が要求されます。さらに面倒なのが、気圧変化と温度変動による焦点変化です。空気の屈折率は真空より若干大きいため、宇宙に行くとレンズの無限遠位置が数十ミクロン変化してしまいます。また、衛星軌道上では日陰/日照による温度変化で、レンズ本体や鏡筒など保持構造が変形して焦点距離が変わります。我々は民生品の中から真空試験、温度試験、機械試験などで性能検証を行って選別したレンズを使用しています。
(c)カメラ: マシンビジョン用に量産されている高感度センサを流用しています。短時間で7等級までの星を捉えるためにセンサには高感度が要求されますが、多くの市販品が十分な量子効率を持っています。一方で、宇宙特有の問題として放射線障害を考慮する必要があります。放射線による影響は、センサのノイズ増大などの経年劣化と、センサ制御部の動作異常の様な急性かつ突発的な障害の2種類があり、両方に対応すべく入念な放射線試験により市販品から選定を行いました。
(c)オンボードコンピュータ(OBC): カメラで取得した画像データを処理し、姿勢を計算するために小型計算機が使われます。近年のIoT技術の発達により、小型で高性能なデバイスが安く入手可能である一方、高密度の集積回路は放射線に弱いという問題があります。開発にあたっては、放射線環境試験と障害発生を予め考慮に入れた回路設計を行う必要がありますが、この辺の設計開発には、これまでの4機の超小型衛星開発を通してえられた知見が生かされています。
小澤 et al. 宇科連講演会3J10 (2017)
 |
 |
| 図2-1: DLASカメラユニット(スタートラッカ)。バッフルについている小さな箱2つがそれぞれ地球カメラ(ECAM)のカメラユニットである。 | 図2-2: DLAS制御ユニット。衛星本体からの電源接続、コマンド・テレメトリの送受信を行い、スタートラッカ2台および地球カメラ(ECAM)4台を制御する。 |
ソフトウェア開発
STTの画像処理ソフトウェアは大きく(1)星像の抽出、(2)星の識別、(3)指向方向及びロール角を計算の3ステップから構成されています。以下ではそれぞれ処理についてどの様な機能をもっているのか簡単に説明します。
(1)点源抽出: 撮像した画像から星像、つまり点光源のみを抽出し、それぞれの撮像センサ上の座標(x, y)計算します。この最初のステップの計測結果が最終的な姿勢決定精度に大きく影響します。計測精度を制限するのは、星自身の光と背景光や散乱光の統計的なゆらぎで、これらは予測不能な測定エラーになります。この偶然誤差を抑制するために畳み込み処理を行い、計測精度を向上させています。また、このステップで宇宙線などの放射線イベントを星として誤認してしまうと、恒星識別に失敗する原因になります。このため、畳込み処理の際にカーネル形状に工夫をすることで、星と宇宙線を高精度で識別する手法を開発しました(特許出願済)。
(2)恒星識別: STTアルゴリズムの要となるのが、観測された星の配列パターンと予め保持している恒星カタログとを比較して唯一の対応天体を決定する「星の識別」処理です。これまでに様々な手法が提案されていますが、本研究では実績のあるトライアングル法などいくつかの手法を試し、誤識別の発生確率や計算速度・実装難易度を考慮した試行錯誤の結果「ピラミッド法」をベースとしたアルゴリズムを開発しました。
従来のピラミッド法では、識別対象となる星と最近接する3つの星を選択し、それら任意のペア間の距離のセットを特徴量として恒星カタログの情報と比較してユニークな解を探索します。本研究では、本来存在しないはずの擬星の誤検知、逆に本来存在すべき星の未検知いずれの場合にも1つまでの異常を許容するため、1つの識別対象星に対し、4つの再近接星の距離情報をカタログに保持することで堅牢性を高めています。最終的に、識別に成功した星の天球座標と機械座標のセットを出力します。
(3)指向方向計算:
恒星識別で得られた恒星の天球座標と検出器座標のセットから衛星の向いている方向を推定します。指向方向の計算する前に最初のステップとして恒星識別の結果の中にはどうしても誤識別が含まれる場合もあるため、RANCSACによる外れ値除去を行います。RANSAC (Random Sample Consensus)とは観測値に外れ値が含まれている場合に、観測値からランダムにサンプリングした中でパラメータ(今回は指向方向)を推定する処理を繰り返し、その中で外れ値を除去した推定結果を出力する方法です。次に外れ値を除いたセットに対して指向方向の計算を行います。
この計算には識別された恒星のセットが最低2つあれば十分ですが、ここでは姿勢決定精度の向上のためにできるだけ多くの識別に成功した恒星を使い最適な指向方向を計算します(QUEST法)。
これら一連のアルゴリズム開発、数学や計算機好きな方には数学的には単純だと思われるかもしれません。実際、アルゴリズムの開発を担当していた学生は、土日に思いついたからという理由で、ほとんど1日でベースとなるプログラムを実装してしまいました。しかしながら、実際に取得した画像には光学的な収差や、センサの分光感度曲線と天文学用の恒星カタログとの間の差異に起因する検出閾値の不一位、背景光や熱雑音の統計的なゆらぎ、惑星・小惑星・人工天体に起因する誤検知、数学的に識別の難しい固有の幾何パターンなどいろいろなイレギュラーに対応する必要がありました。DLASの開発でも机上で考えられることは調べ尽くしたつもりですが、実際の宇宙空間で画像を取得して、正しく測位できることの実証が必要不可欠です。
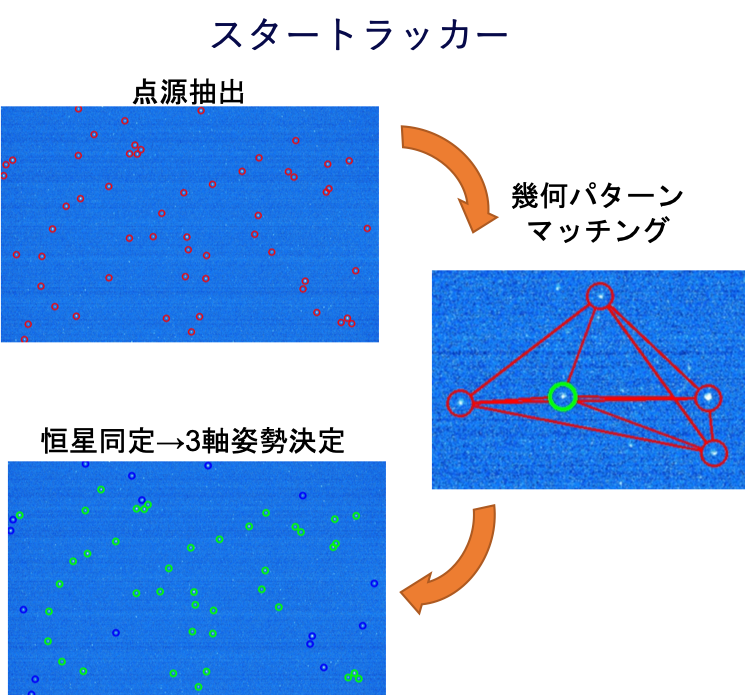
図2-3: スタートラッカの動作原理。